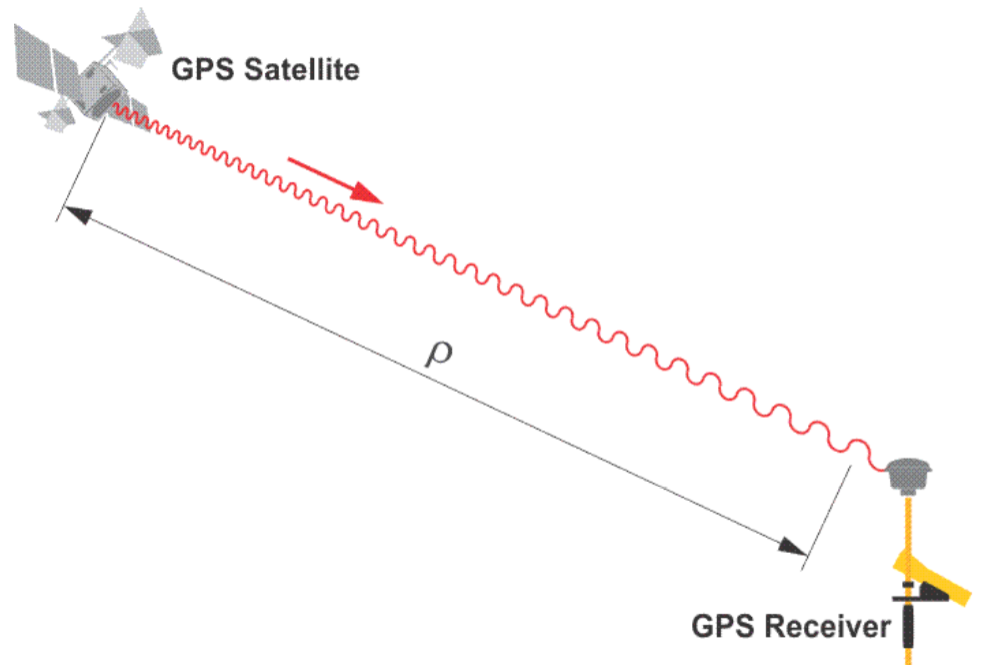
Basic Principle of SatNav
- Basically the satellite with a know position transmit a regular time signal.
- Based on the measured travel time of the radio waves the position of the receiver is calculated.
Example
Let us assume that we are in a car and need to determine our position on a long and straight stree. At the end of the street there is a radio transmitter sending a time signal pulse every second. The car is carrying a clock, which is synchronised to the clock at the transmitter.
By measuring the elapsed travel time from the transmitter to the car we can calculate our position on the street.
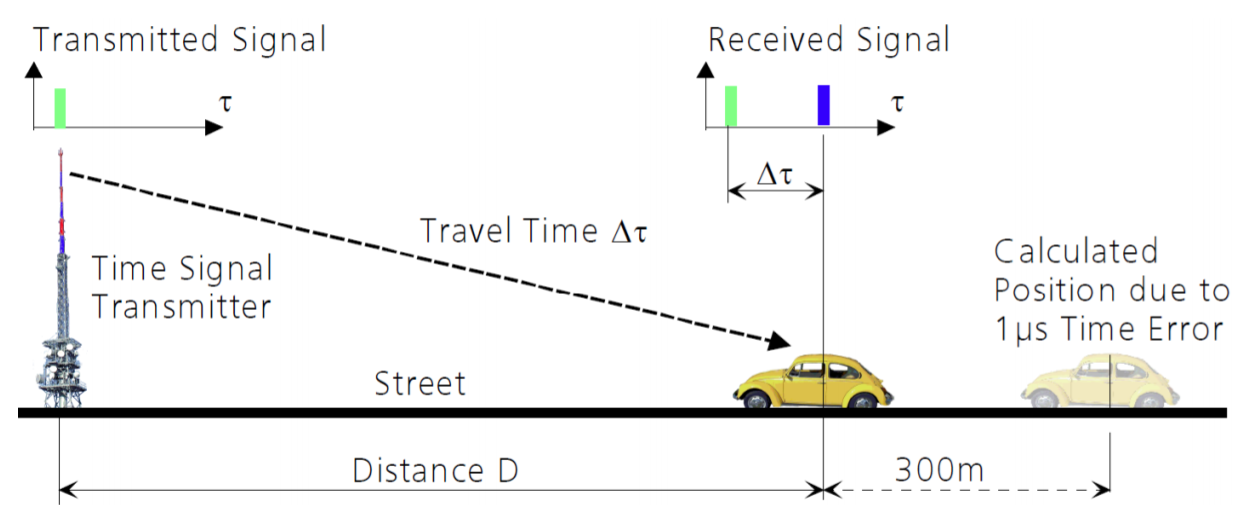
The distance D is calculated by multiplying the travel time by the velocity of light.

In navigation this observed distance referenced to the local clock is referred to as pseudorange.
The solution involves using a second synchronized time signal transmitter, for which the separation(A) to the first transmitter is known.
By measuring both travel times it is possible to exactly establish the distance(D) despite having an imprecise on-board clock.
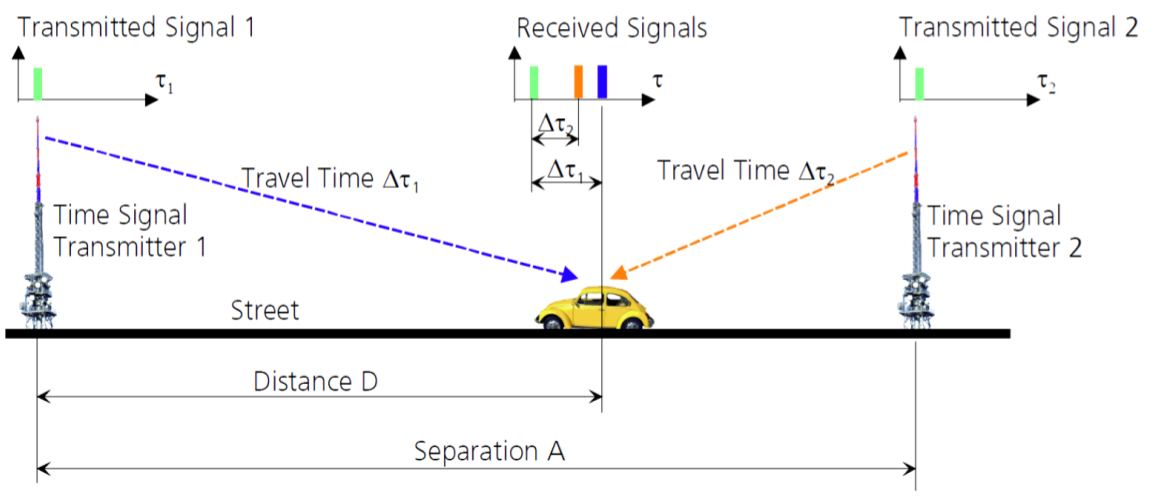

So to exactly calculate the position and time along a line one required two time signal transmitters.
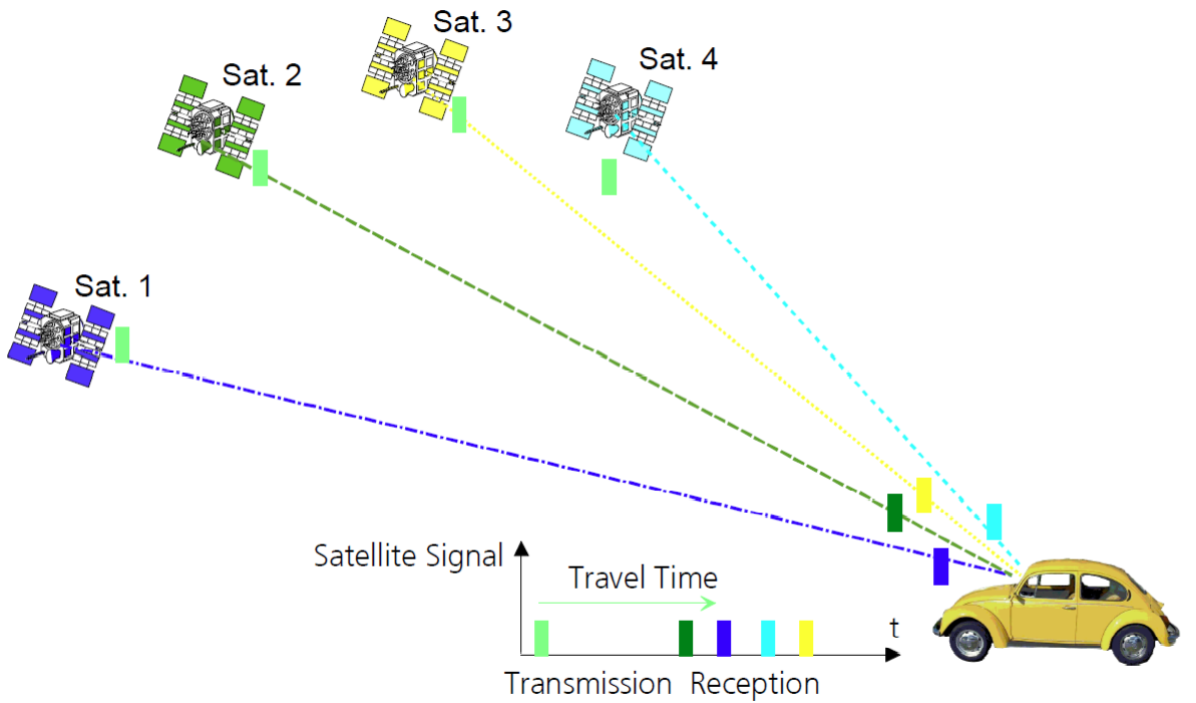
Satellite navigation systems use satellites ad time-signal transmitters. So, contact to atelast four satellites is necessary in order as well as the exact time.
Satellites
The naviagtion message includes the following:
- GNSS date and time
- Satellite status and health
- Satellite ephemeris data, which allows the receiver to calculate the satellite's position.
$GPGGA, 172814.0,3723.46587704, N, 12202.26957864, W, 2,6,1.2,18.893, M,-25.669, M, 2.0,0031*4F
This can be broken down like:
| Field | Meaning |
|---|---|
| 0 | Message ID |
| 1 | UTC of position fix |
| 2 | Latitude |
| 3 | Direction of latitude:N-North, S-South |
| 4 | Longitude |
| 5 | Direction of longitude: E-East, W-West |
| 6 | GPS Quality indicator.
0: Fix not valid 1: GPS fix 2: Differential GPS fix, OmniSTAR VBS 4: Real-Time Kinematic, fixed integers 5: Real-Time Kinematic, float integers, OmniSTAR XP/HP or Location RTK |
| 7 | Number of SVs in use, range from 00 throught 24+ |
| 8 | HDOP |
| 9 | Orthometric height(MSL reference) |
| 10 | M:Unit of measure for orthometric height in meters |
| 11 | Geoid Separation |
| 12 | M; geoid separation measured in meters |
| 13 | Age of differential GPS data record, Type 1 or Type 9. |
| 14 | Reference station ID |
| 15 | The checksum data always begins with * |
Reception
The receivers need atleast 3 satellites to obtain 2D postion and 4 satellites for a 3D position. If more are available, these additional observations can be used to improve the position solution. The receivers know the pseudorandom code which is generated by the each satellite. Pseudorandom means that the signal appears to be random but it's not. It repeats itself after a certain period of time.
Through code correlation the receiver is able to recover the signal and the information they contain.
We know that every navigation satellite is equipped with an atomic clock that keeps time with exceptional accuracy. The receiver then calculate the difference between its own clock and the time the signal was transmitted.
For each satellite tracked the receiver determines the propagation time.
The below figure shows the transmission of a pseudorandom code from a satellite. The receiver can determine the time of propagation by comparing the transmit time to the receive time.
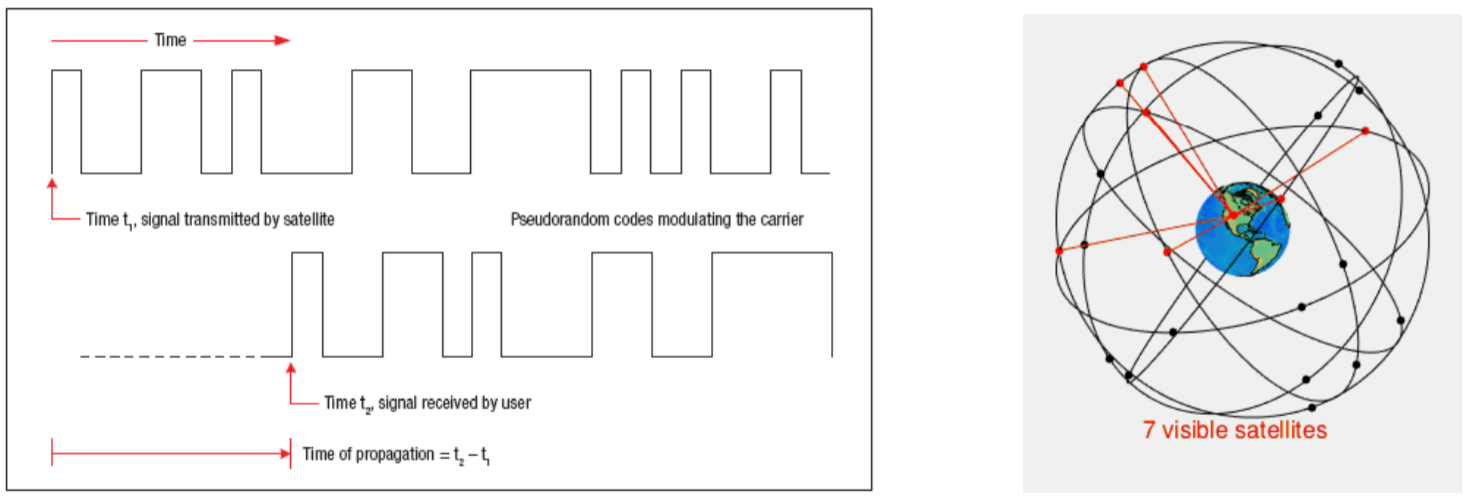
Computation
First the receiver calculates the Propagation time then Distance to the satellite:
Propagation time = Time signal reached receiver - Time signal left satellite
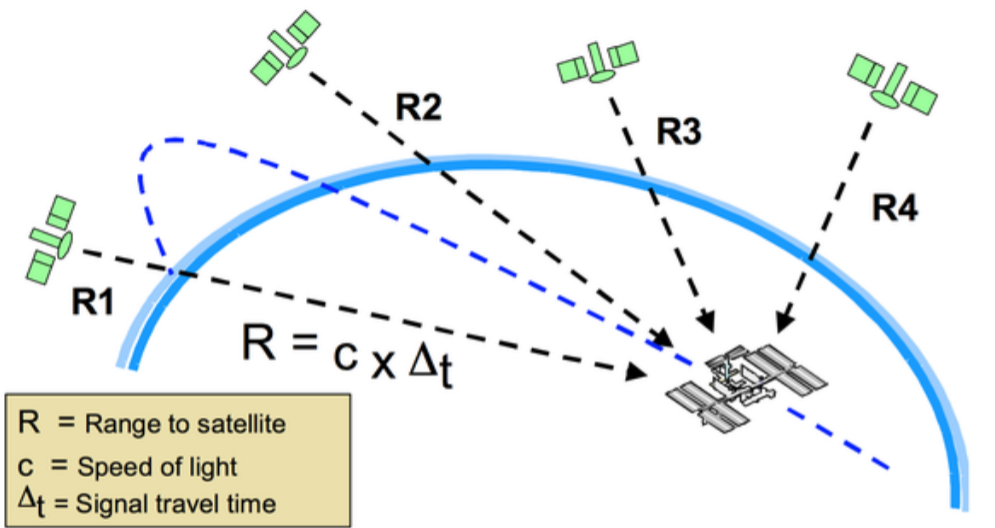
Distance to satellite = Propagation time * Speed of light
Through trilateration, the receiver calculates its position.
Comparing GNSS to triangulation is not entirely correct. Trilateration is better we can say as trilateration is based upon distances rather than the intersection of lines based on angles.
Another important aspect is the time measurement. For example, the determination of ranges, like distance measurement in a modern trilateration survey is done electronically. In both cases, distance is a function of the speed of light, an electromagnetic signal of stable frequency and elapsed time.
GNSS is passive in the sense that only the satellites transmit signals, the users simply receive then. A GNSS signal communicates with the receiver "telling" the time on the satellite, instanteneous position of it, info. about atmospheric corrections and identity of the satellite to tell where it came from.