Propagation
GNSS Signals pass through the near-vacuum of space, then though the various layers of the atmosphere to the earth.
Errors and Delays
To determine the position we need to know the range of the satellite. This is the direct path distance from the satellite to the user equipment. Gradually the signal will bend when travelling through Earth's atmosphere.
The bending increases the total time taken for the signal to travel from the satellite to the receiver.
So then to avoid these type of errors we use computed range which contains the propagation time error, or atmospheric delay error. Since it contains delay errors we refer it to as "Pseudorange".
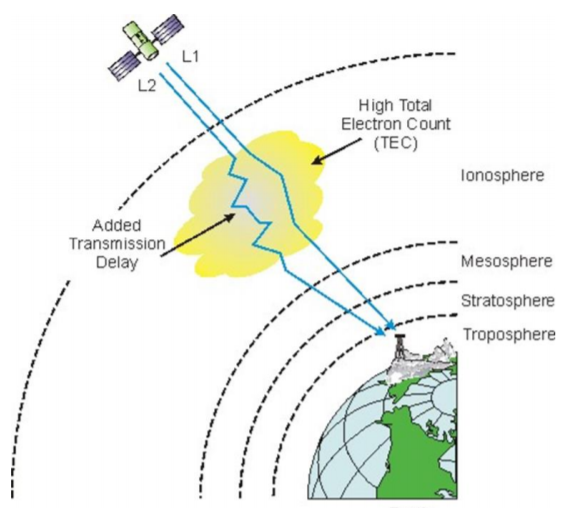
Among all the atmospheric layers, Ionosphere contributes the most atmospheric error. It resides between 70-1000 km above earth's surface. As we know it contains free electroncs, consequently influencing electromagnetic wave propagration.

Ionospheric delays are frequency dependent. It can be virtually eliminated by calculating the range using both L1 and L2. The troposhere( the lowest layer of the earth's atmosphere), contributes to delays due to local temperature, pressure and relative humidity.
The main challenge is that we can't eliminate the troposheric delay the way ionospheric delay can be. One way of compensating troposheric delay erros is to have a model and then predict the errors.
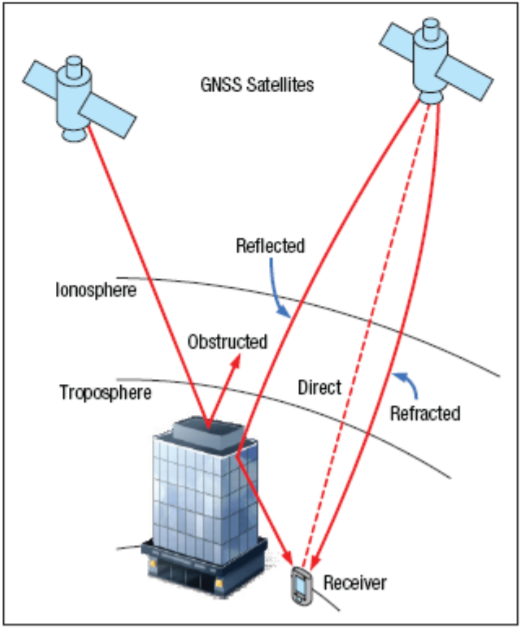
Techniques have been developed whereby the receiver only considers the earliest arriving signals and ignore multipath signals, which arrives later.
Computation
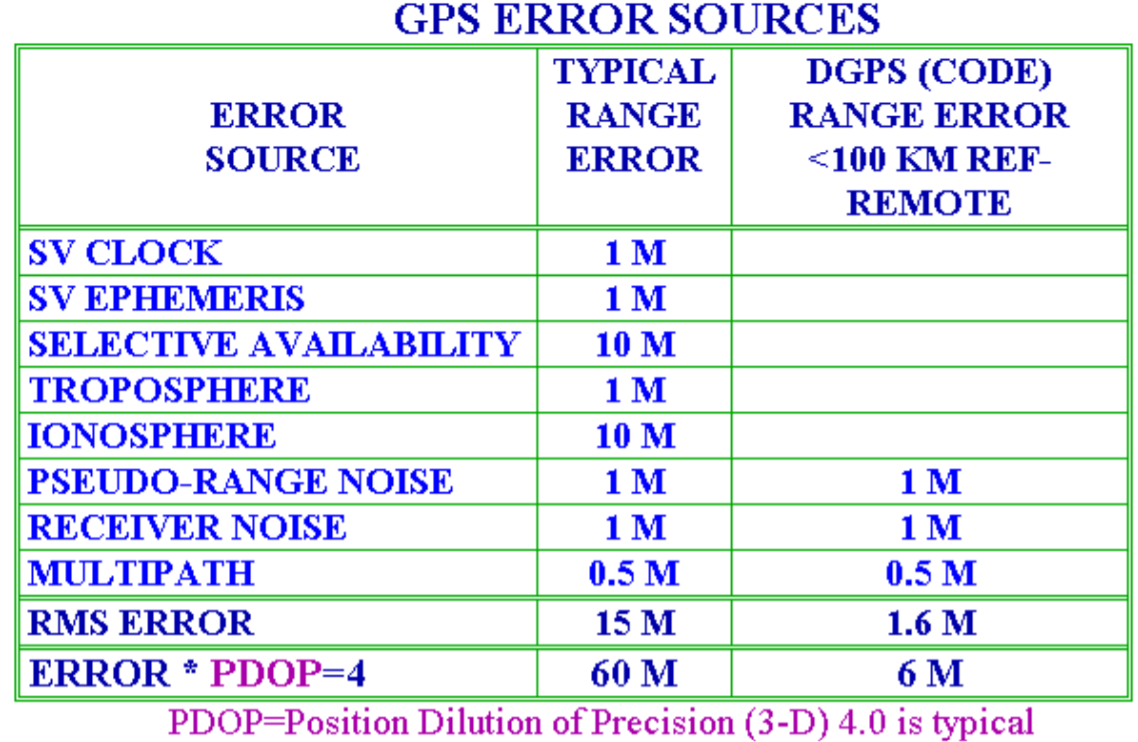
In summary, in the below table are the GNSS error sources that affect the accuracy of psuedorange calculation.
| Contributing Souce | Error Range |
|---|---|
| Satellite Clocks | ±2 m |
| Orbit Erros | ±2.5 m |
| Ionospheric Delays | ±5 m |
| Troposheric Delays | ± 0.5 m |
| Receiver Noise | ±0.3 m |
| Multipath | ±1 m |
The receiver can advance or delay its clock until the pseudo ranges to the three satellites converge at a single point. Using this process the receiver clock error is eliminated.
When we extend it into the 3D world we need a fourth satellite to compute the position.

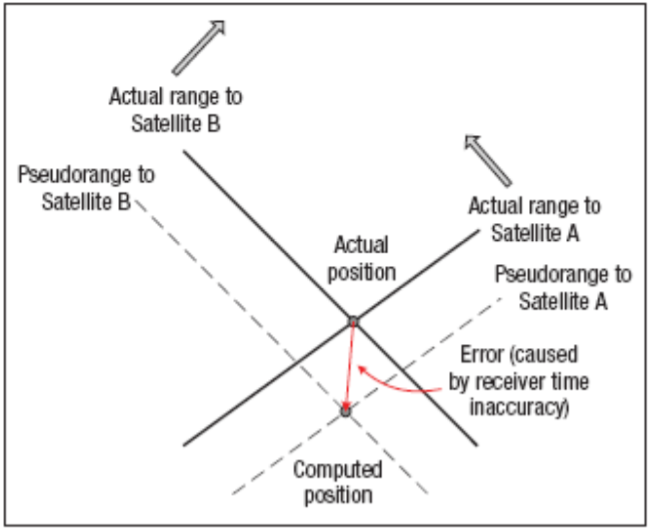
Now, due to receiver clock error, the intersecting points between the range of the satellite A and B do not match with the actual position.
The receiver clocks are not accurate as satellite clocks. Their typical accuracy is only about 5 parts per million.
When multiplied with the speed of light the accuracy is within ± 1500 meters.
When we now compute the range of the third satellite, the points will not intersect to a single computed position.
The receiver knows that the pseudo ranges to the three satellites do not intersect due to receiver clock errors.

GPS Accuracy
- Selective Availability(SA) to introduced intentional errors of up to a hundred meters into the publicly available navigation signals.
- WAAS(Wide Area Augnmentation System), since 2000 to accuracy to 2m horizontal.
- DGNSS(Differential GNSS): within cm accuracy
GPS Errors
GNSS Errors are a combination of noise, bias and blunders.
Noise Errors: These are the combined effect of PRN(Pseudo random noise)(±1m) and noise within the receiver noise (±1m)
Bias Errors: SV Clock errors uncorrected by control segment can result in one meter errors in position
Troposheric delays : ±1 m position error.
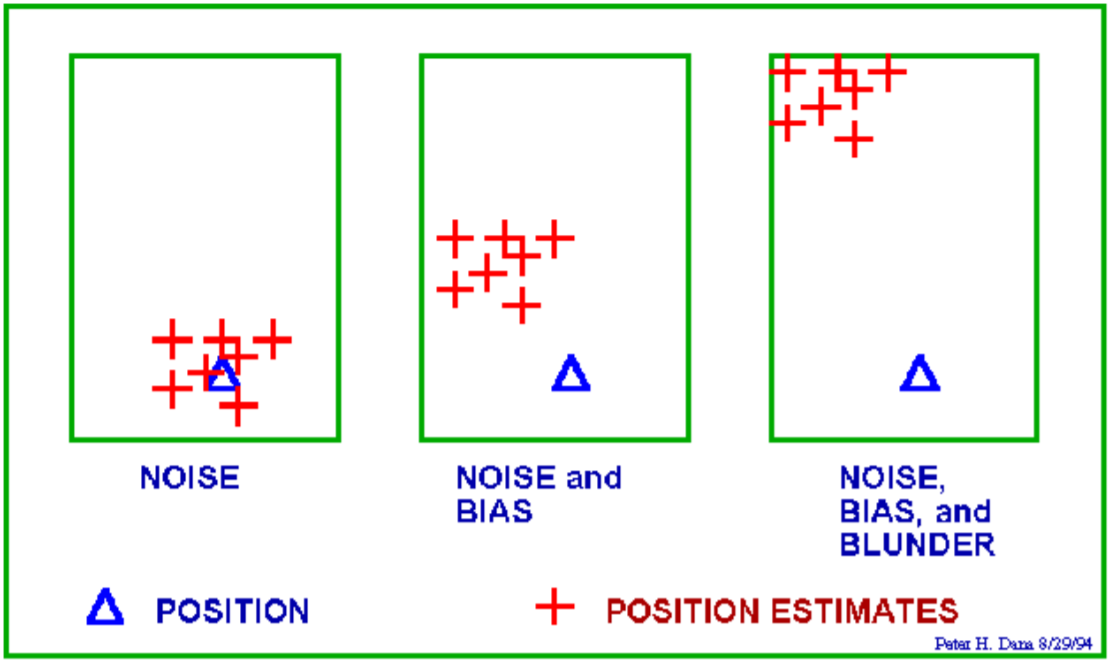
Multipath: 0.5m of position error. It is caused by reflected signals from surfaces near the receiver that can either interfere with or be mistaken for the signal that follows the straight line path from the satellite.
Blunders: This can result in errors of hundred of Kms. User mistakes , including incorrect geodetic datum selection, can cause erros 1 to 100m receiver errors from software or hardware failures can cause blunder errors of any size.
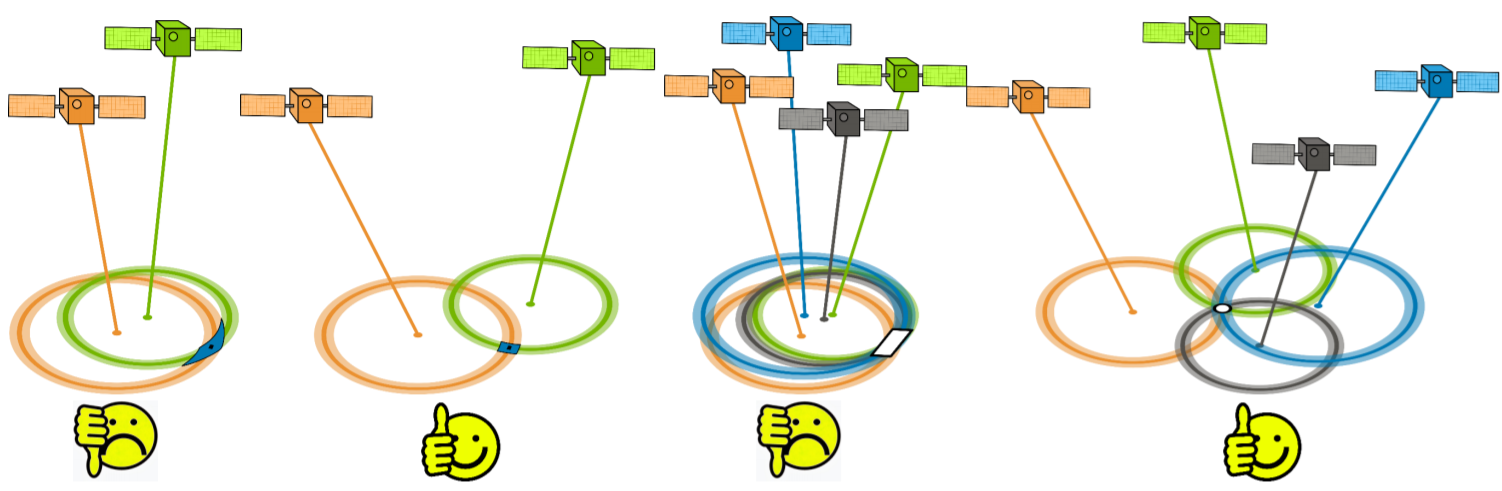
Dilution of Precision(DOP)
A numerical value expressing the confidence factor of the position solution based on current satellite geometry. The lower the value, the greater the confidence in the solution. DOP can be of the following forms.
- GDOP: Uncertainty of all parameters (latitude, longitude, height, clock offset)
- PDOP: Uncertainty of 3D parameters (latitude, longitude, height)
- HTDOP: Uncertainty of 2D and time parameters (latitude, longitude, time)
- HDOP: Uncertainty of 2D parameters.
- VDOP: Uncertainty of height parameter
- TDOP: Uncertaintyl of clock offset parameter.
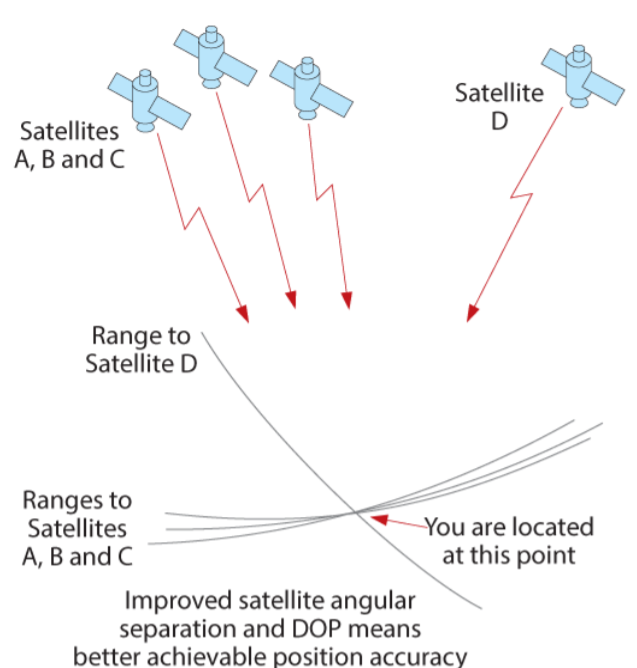
Geometric Dilution of Precision (GDOP)
Error caused by the relatice position of the GNSS satellites. If the satellites used in the calculation are physically close together then you have poor GDOP
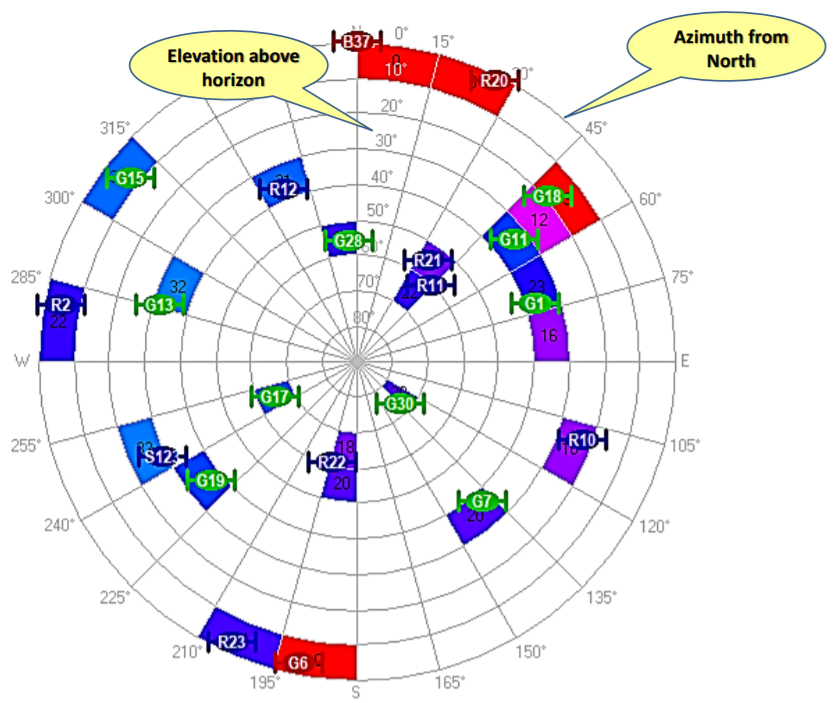
Satellite Skyplot

Error Sources